



Olá, tudo bem? No tutorial de hoje, vamos aprender um pouco mais sobre o Servo Motor, seu funcionamento e suas aplicações. Também veremos suas principais características e diferenças comparadas ao Motor de Passo. Vamos lá!
Esse tutorial será inteiramente teórico, Caso deseje saber como utilizar o Servo motor, acesse o nosso blog.
O tutorial será dividido nos tópicos a seguir, caso deseje ir para alguma parte específica do tutorial, pode clicar no título e você será redirecionado para a parte que deseja:
Estrutura e Controle do Servo Motor
Quais diferenças entre um Servo motor CA e um Servo motor CC
Algumas aplicações do Servo motor
Como funciona um Servo motor?
O Servo motor é um tipo de atuador eletromecânico capaz de movimentar, com alta precisão a velocidade, aceleração e posição de uma carga atuada. Possuí este nome, pois diferente dos motores convencionais, ele obedece a determinado comando estabelecido, “Servindo” assim ao comando que lhe foi enviado.
É muito utilizado em situações onde é necessário o controle e precisão em projetos, tanto no âmbito industrial em braços robóticos e esteiras, quanto em projetos maker e hobbistas. Seus componentes e construção garantem o posicionamento e a velocidade em seus movimentos.

Como podemos ver acima, existem diferentes tipos, tamanhos, formatos e modelos de Servo motor que mesmo com suas características diferentes, todos eles podem ser controlados de maneira precisa. Veja todas as variedades de Servo Motor presentes na Curto Circuito.
Estrutura e Controle do Servo Motor
O Servo Motor, diferente dos outros tipos de motor, consegue ser preciso, pois trabalha com um sensor que lê o posicionamento atual, permitindo controlar precisamente a velocidade, aceleração e posição angular.
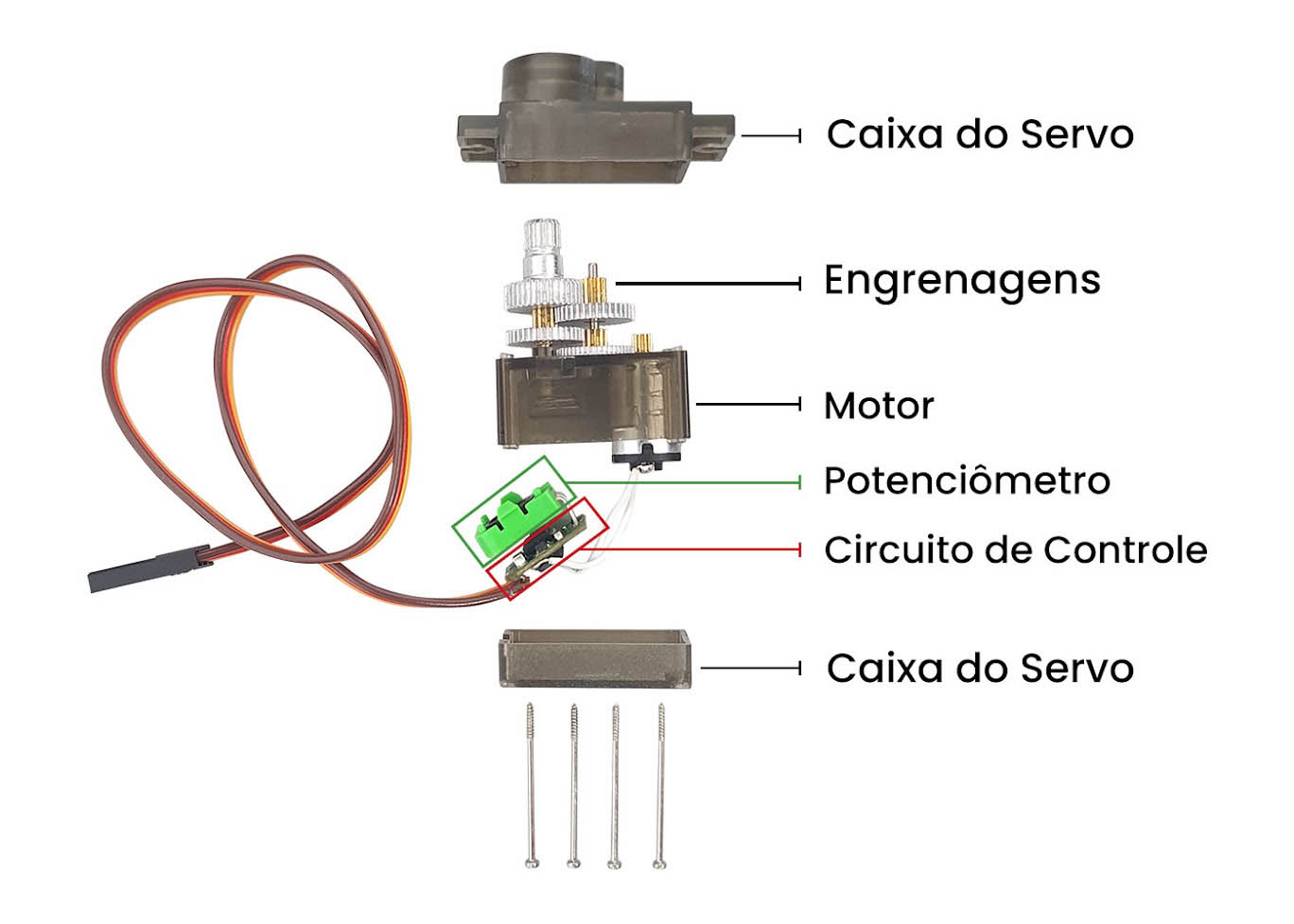
Como podemos ver na imagem acima, a estrutura do servo motor é composta por:
-
Circuito de Controle: Monitora a posição do potenciômetro e também controla o acionamento do motor, recebendo o sinal vindo de um microcontrolador como o Arduino, ele analisa o sinal, definindo a posição do servo e ajustando as variáveis do motor para atingir o resultado esperado.
-
Motor: É o que movimenta o eixo principal e suas engrenagens internas. Ele recebe o ajuste que vem do circuito e se adequa de acordo com o que o Circuito de Controle define.
-
Engrenagens: Elas reduzem a rotação do motor, transferindo mais torque para o eixo principal de saída. Sua construção dentro do Servo permite também girar o potenciômetro junto ao eixo.
-
Potenciômetro: por ser ao eixo de saída, ele consegue monitorar a posição em que se encontra o ângulo do eixo.
Caixa do Servo: A caixa do servo acopla todo o conjunto listado acima, permitindo o motor ser compacto e eficiente.
Essas características podem variar de acordo com o tipo de motor, como por exemplo, os servos motores AC, possuem em sua construção motores síncronos ou motores de indução, também chamado de assíncrono, o que o torna sua construção interna diferente do Servo motor CC, alterando também suas capacidades de funcionamento.
Tipos de Servo motor
Servo Motor CC
O Servo motor CC(Corrente Contínua), como descrito mais acima é um dispositivo eletromecânico composto por: Circuito de Controle, Motor, Engrenagens, potenciômetro e caixa do servo.
É o tipo de motor mais utilizado atualmente por Makers e hobbistas que projetam utilizando Arduino, ESP32 e ESP8266. E também é amplamente utilizado em diversos projetos de automação profissional, tanto em ambientes industriais quanto em ambientes caseiros e até mesmo em ambientes médicos como em cirurgias de precisão, onde o controle e o cuidado é extremamente necessário para conseguir preservar a segurança e saúde do paciente.
O Servo Motor CC é prático e preciso, possibilitando criar diversos tipos de projetos, desde braços robóticos, esteiras, máquinas CNC, até mesmo Aeromodelos e Automodelo.
Logo abaixo, podemos ver alguns tipos de Motor CC:

Esses Servos na imagem acima, podem ser operados por um microcontrolador, como por exemplo o Arduino Uno R3. Com ele, é possivel programar de forma simples as posições que desejar.
Servo Motor CA
Os Servo motores CA(Corrente Alternada) são normalmente utilizado em aplicações industriais, onde é necessária uma elevada potência e controle preciso em elevadas velocidades.

Este tipo de motor pode ser alimentado por uma corrente alternada (CA) monofásica ou trifásica.
Por exigir menos manutenção, o Servo Motor CA é mais confiável e também rígido que o Servo Motor CC.
Sua subdivisão é realizada entre motor CA síncrono e de indução (Assíncrono).
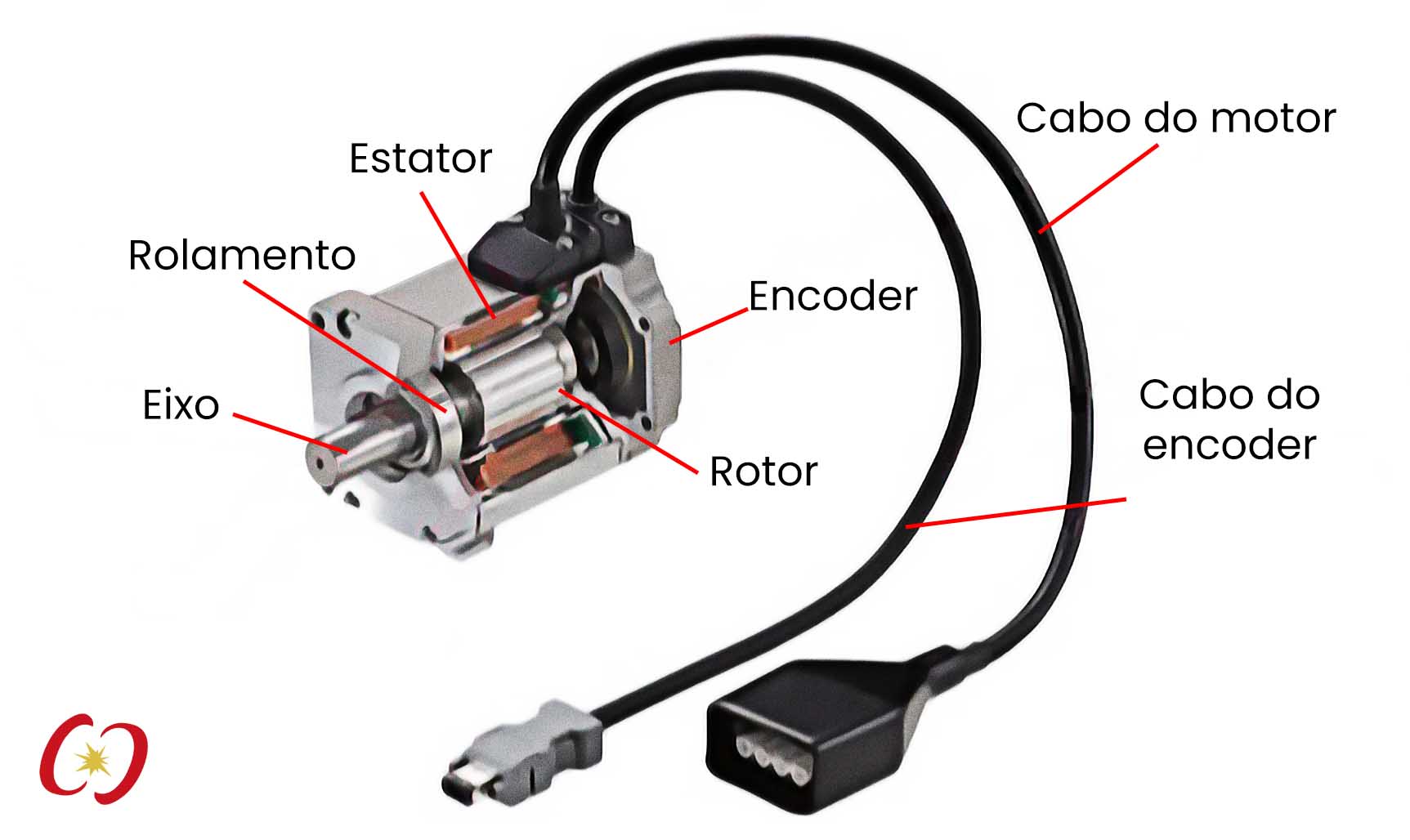
O Servo motor CA síncrono é atualmente o mais encontrado no ambiente industrial e é composto de Estator e Rotor.
Sua construção é feita de uma estrutura cilíndrica e núcleo, e sua bobina de indução é enrolada em volta do núcleo do Estator. Com isso, a extremidade da bobina é ligada a um fio condutor, que fornecerá corrente quando conectado a uma fonte de energia. O rotor é constituído por um imã permanente.
Dessa maneira, o motor não precisa de indução de corrente alternada no rotor.
Por conta de suas construção e características estruturais, o Servo Motor CA pode ser chamado de Brushless (sem escova);
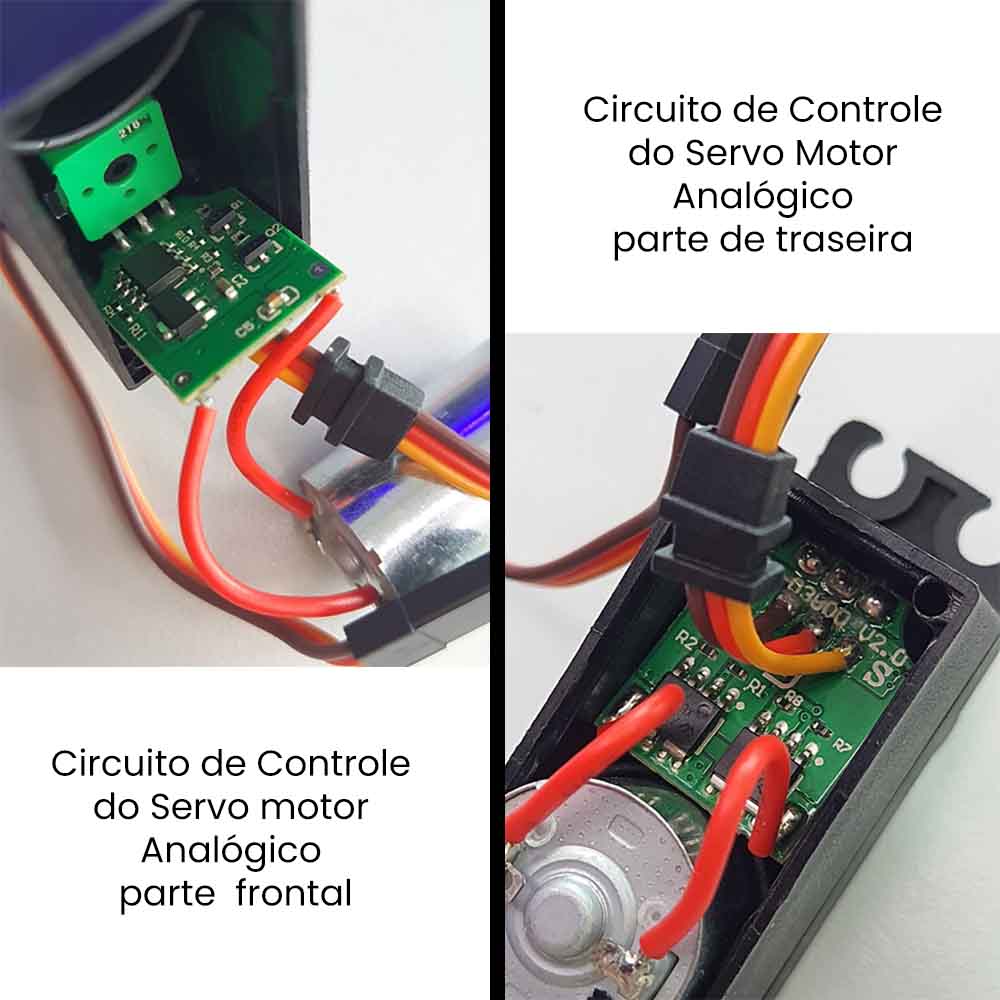
Servo motor Analógico
O servo motor analógico funciona através de pulsos de tensão subsequentes, de ativação e desativação. Normalmente eles recebem 50 pulsos por segundo, e esses pulsos de tensão de fazem o motor girar, com isso o torque é produzido.
Geralmente, os pulsos de tensão com maior duração fazem o motor produzir torque e velocidade mais elevados.
No entanto, quando pulsos mais curtos são gerados, como, por exemplo, quando um Stick/switch é movido levemente ou algumas forças externas como vibração, choques, comandos de centralização de giroscópios, ajustes leves nos comandos direcionados ao motor afetam o potenciômetro interno, esses pulsos de controle curtos se repetem mais vezes, e isso afeta negativamente a precisão do Servo Motor.
Por serem do tipo analógico, os servos motores analógicos não tem a capacidade de produzir torque para pulsos curtos, isso diminui a sensibilidade de resposta do motor, o que o torna incapaz de responder a pequenas variações.
Essa incapacidade é chamada de zona morta, ou faixa de tensão de banda morta, que é maior para os servos analógicos.
Como resultado final, você obtém respostas mais lentas e com o controle instável.
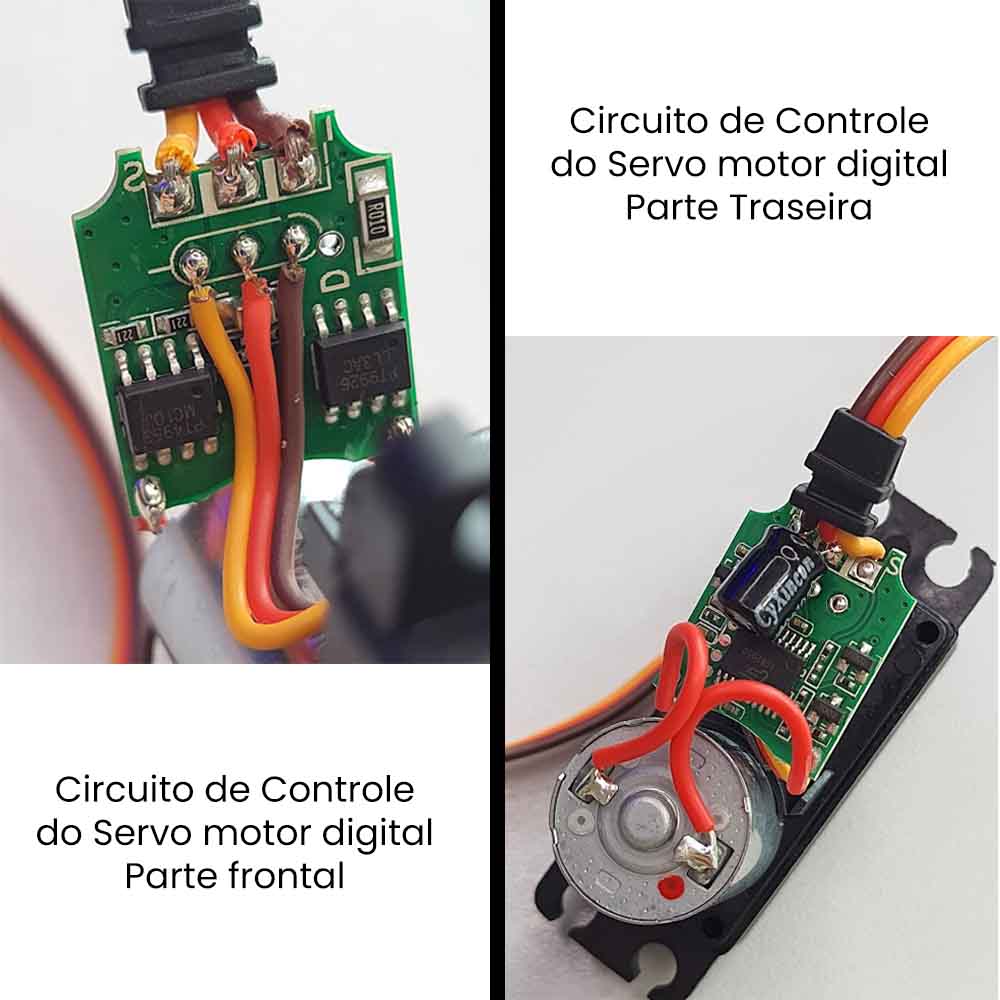
Servo motor Digital
O servo motor digital funciona de maneira semelhante ao Servo Motor convencional Analógico.
Sua principal diferença se encontra na construção do Servo motor Digital, que possui um microprocessador para leitura do sinal de entrada que controla o Servo de maneira totalmente digital.
Esse microprocessador recebe e envia pulsos de tensão em alta frequência para o Servo motor. Esses pulsos podem chegar até altos picos de até 400 vezes por segundo e por isso, são enviados, quase seis vezes a mais do que o Servo Analógico envia para o motor.
Com isso, o motor é capaz de trabalhar com torque mais consistente para tempos de resposta mais rápidos e suaves. Isso resulta em Servos que possuem maior torque de retenção e sistema de frenagem aprimorado. No entanto, pulsos de alta frequência exigem mais emissão de energia do motor.
Servo motor 180°
Podem ser tanto analógicos quanto digitais. O Servo Motor 180° é capaz de realizar movimentos controlados, dentro da faixa do seu ângulo. Podendo ir de 0 a 180°, esse tipo de motor consegue chegar precisamente na posição que deseja de forma controlada. Em suas engrenagens, há um limitador para preservar a integridade das engrenagens e o funcionamento correto do Circuito de Controle.
Servo motor 360º de giro contínuo
O Servo Motor 360° de giro contínuo também pode ser tanto analógico quanto digital. No entanto, seu funcionamento é diferente. Este tipo de Servo motor gira constantemente sem limitações. Não há um limitador como no Servo motor 180°. O seu Circuito de Controle também opera de forma diferente. Neste caso, é possível controlar também a velocidade e o sentido do Giro do Servo. Veja no video abaixo, o Servo motor 360° de giro contínuo funcionando.
Servo motor 360º
Como a versão de 180 graus, o Servo motor 360º é capaz de controlar seus movimentos de forma precisa, podendo ir de 0 a 360°. Esse tipo de Servo não possuí um limitador em suas engrenagens, e seu controlador é capaz de movimentar o eixo precisamente em torno dos 360°
Quais diferenças entre um Servo motor CA e um Servo motor CC
Podemos traçar um paralelo entre o Servo motor do tipo CA (Corrente Alternada) e o Servo motor do tipo CC (Corrente Contínua), buscando suas características e comparando eles entre si.
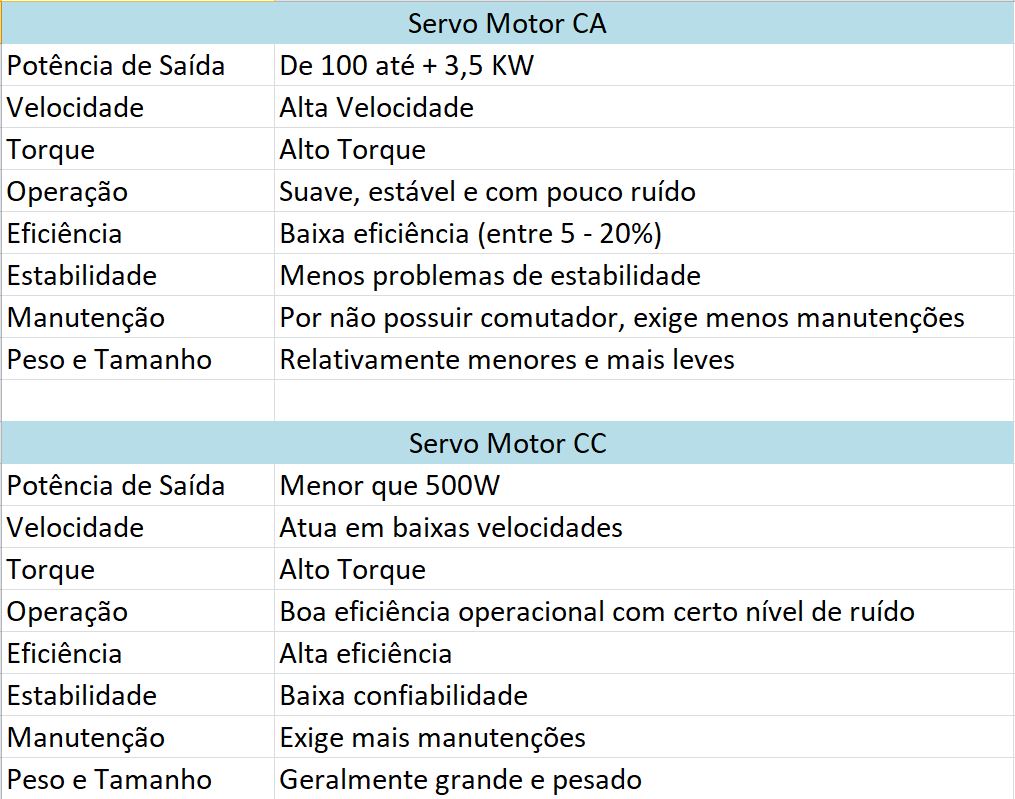
Com essas características descritas acima, podemos traçar um paralelo entre aplicações em que podemos utilizar cada tipo de servo motor.
Para aplicações em alta potência e velocidade, alto torque, pouco ruído e estabilidade, o recomendado é o Servo motor AC, que também tem baixa necessidade de manutenção e são relativamente menores e mais leves.
Já em aplicações, onde é necessária uma menor potência, maior precisão em baixar velocidades, alto torque, boa eficiência operacional e alta eficiência, o recomendado é o Servo motor CC, pois além dessas qualidades, os Servos motores CC são geralmente mais baratos do que os AC.
Algumas aplicações do Servo Motor
A versatilidade dos Servos Motores é gigante. É um motor no qual se pode utilizar em praticamente em qualquer aplicação.
Com isso, algumas, das muitas aplicações, podem ser:
Robótica Industrial: Os Servos motores são muito utilizados no Ramo industrial para controlar movimentos precisos, tanto de máquinas robóticas que executam tarefas repetitivas, quanto em braços e pernas de robôs extremamente dinâmicos e ativos dentro do âmbito industrial.
Máquinas CNC: São maquinas onde o controle de cada posição é extremamente necessário para seu funcionamento. Em cada eixo de atuação da máquina CNC necessita de um controle especifico de posição. Há várias maneiras de se fazer isso, no entanto, utilizar um Servo Motor Simplifica todo o processo de construção e operação da máquina CNC.
Sistemas de posicionamento Automático: Em máquinas onde o posicionamento é crucial, como em máquinas de embalagem, a utilização de Servos motores é essencial para o controle preciso da posição dos produtos e equipamentos.
Aeromodelismo: Em Aeromodelos, o servo motor é muito utilizado para o controle preciso de movimentos e garantir estabilidade do Aeromodelo.
Indústria Alimentícia: Nas linhas de produção do ramo alimentício, os servos motores são utilizados para controlar precisamente a dosagem dos ingredientes e precisão do corte.
Sistema de Câmeras de Segurança: Nesse tipo de equipamento, o Servo motor pode controlar o movimento da câmera e até mesmo o zoom.
Braços Mecânicos em hospitais: Em braços mecânicos hospitalares, utilizados em diversos tipos de cirurgia onde é necessário a precisão e o controle, os Servos motores estão presentes, garantindo a segurança nesses processos, permitindo a máxima preservação no momento da cirurgia.
Automóveis: Em sistemas onde é necessário o controle da direção assistida e o controle da velocidade de cruzeiro, Servo motores são utilizados para garantir a precisão necessária para o controle e condução segura e eficiente.
Com esses pequenos exemplos, é possível demonstrar a variedade de aplicações onde o servo motor se torna extremamente necessário e crucial para o funcionamento do projeto, garantindo a precisão necessária dos movimentos.
Motor de passo x Servo Motor
Motores de passo funcionam de maneira diferente dos Servos motores. Como visto em nosso post Introdução ao Motor de Passo, ele funciona através de graus, e são controlados através de sinais digitais enviados para as suas bobinas, possibilitando a rotação fracionada do eixo, sem a necessidade de escovas internas.
Uma característica importante dos motores de passo é a capacidade de trabalhar constantemente, independente da carga com velocidade constante, desde que a carga utilizada, não exceda o torque do motor.
Além disso, os motores de passo se movimentam através de passos quantificados, com isso, é possível analisar a posição exata do eixo se não houver extrapolação do torque exigido pela carga.
Qual tipo de Servo motor escolher?
Isso vai depender da sua aplicação.
Motores de passo são eficiêntes pois são capazes de oferecer posicionamento trabalhando com um circuito em malha aberta, também oferecem a posibilidade de posicionar o seu eixo de maneira muito precisa, disponibilizando maior torque e menor custo, mas são sucetiveis as poluições de chão de fábrica e tem RPM reduzido. Também são sucetiveis a perder um passo caso a carga de torque exigida seja maior do que o motor pode disponibilizar.
Já os servos motores, como citado acima, são extremamente precisos e podem possuir alta quantidade de RPM, além de fornecerem um torque de pico momentâneo em sua faixa de velocidade. Os Servo motores, podem ser utilizados junto a enoder de precisão absoluta, que mesmo desligados, mantém as informações da posição. A sua principal desvantagem é o custo quando comparado com o Motor de Passo.
Veja o nosso conteúdo para saber mais sobre o Motor de Passo, acesse o nosso Conteúdo: Introdução ao Motor de Passo.
Conclusões
Muito utilizado em todos os ramos de automação, o Servo Motor é um tipo de motor extremamente prático e versátil, permitindo realizar o controle de muitas aplicações nas mais variadas aplicações, como em projetos makers e hobbistas, projetos industriais e até mesmo no ambiente cirúrgico. Sendo extremamente preciso, o Servo motor se destaca, garantindo segurança na operação em que é solicitado.
Com o tutorial de hoje, conseguimos entender o funcionamento do Servo Motor, Suas principais Características, Diferenças entre os tipos de Servo Motor e algumas aplicações.
Espero que suas dúvidas tenham sido esclarecidas :)
Caso ainda tenha alguma dúvida, deixo abaixo nos comentários, além de seu feedback e sugestões. Até a próxima !!