Todas Categorias
 Acessórios
Acessórios  Arduino
Arduino Arduino
 Componentes Eletrônicos
Componentes Eletrônicos  Display
Display Display
 Ferramentas
Ferramentas  Internet Das Coisas
Internet Das Coisas Internet Das Coisas
 Módulos
Módulos  Motores
Motores  Sensores
Sensores
Os Motores de Passo são de extrema importância em projetos em que há a necessidade da movimentação de um objeto com precisão, já que os motores podem ser controlados através de sinais digitais que são enviados para as suas bobinas, permitindo a rotação fracionada do seu eixo.
A rotação pode ser lida em passos ou ângulos necessários para uma volta completa daquele mesmo motor, a configuração do passo pode tornar um motor mais rápido, porém menos preciso, no caso de poucos passos para uma volta completa. Ou menos rápido e mais preciso, em casos com mais passos necessários para uma volta completa, essa configuração será feita de acordo com as exigências do projeto.
Se você tiver, por exemplo, um motor com ângulo de passo de 1,8°, para uma volta completa serão necessários 200 passos, que é o valor de 360° (ângulo total de um círculo ou uma volta), dividido pelo ângulo de cada passo individual.
Para análise de um motor e escolha do melhor modelo para o seu projeto, é necessário avaliar os seguintes parâmetros:
-Polaridade: Um motor de passo pode ser dividido em dois modelos de acordo com a polaridade, sendo bipolar e unipolar, a principal característica de um motor unipolar é a derivação central em suas bobinas, enquanto que o modelo bipolar não conta com a derivação. Lembrando que não é o motor em si que é bipolar ou unipolar, e sim o driver que é necessário para a ligação desses motores, é utilizado “motor bipolar/unipolar” apenas por convenção.
-Número de fases: O número de fases de um motor se refere às diferentes combinações de polos energizados em sequência para atrair o rotor, o número de fases interfere diretamente no ângulo de passo do motor.
-Torque (Kgf.cm): O torque é proporcional ao produto da corrente do acionamento e o número de enrolamentos da bobina, quando há um número maior de enrolamentos o torque é maior, mas em consequência, a velocidade do motor é menor, sendo o contrário também verdadeiro, se há um menor número de enrolamentos a velocidade é maior e o torque menor. Para a escolha do melhor motor para o seu projeto é necessário que a curva de torque do motor seja analisada, essa curva pode ser encontrada no datasheet do motor. Como o torque máximo de um motor é quando o mesmo está parado, para dimensionamento é recomendada a utilização do valor de torque de acordo com a corrente nominal total.
-Velocidade (RPM):Assim como mencionado no tópico sobre torque, o número de enrolamentos de uma bobina afeta diretamente na velocidade de um motor, sendo que o número de enrolamentos é diretamente proporcional ao torque e inversamente proporcional a velocidade de um motor de passo. Além disso, a quantidade de passos também interfere na velocidade, quanto mais passos forem necessários para um motor girar, menor a sua velocidade, pois o motor precisa aguardar esses pulsos.
A unidade de medida da velocidade é a RPM (rotação por minuto).
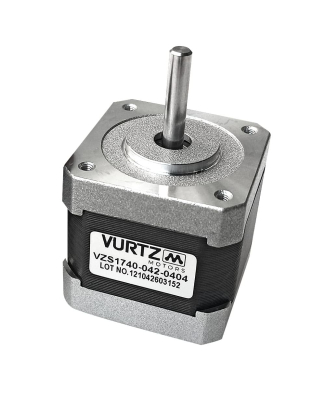
-Modelo: Entre os motores de passo existem os modelos Nema 17, Nema 23 e Nema 34, sendo que os números que definem os modelos são correspondentes a dimensão da secção do motor em polegadas (0,1). Por exemplo, um Nema 17 tem 1,7 polegadas, o que equivale a aproximadamente 43,18mm.
Além da diferença de dimensão entre os modelos de Nema, também há mudanças significativas no torque , confira as informações na folha de dados dos motores.
-Driver:
Para a utilização do motor de passo é necessário o uso de drivers para enviar os pulsos necessários para acionamento das bobinas.
Para escolha de um Motor de Passo é necessário levar em conta o torque, mas é importante que se tenha em mente que o termo “Holding Torque” disponível em muitos datasheets se refere ao torque do motor energizado, porém parado, isso se refere à força necessária para girar o eixo do motor, levando em conta que ele está nessa situação, parado e energizado, por isso é imprescindível que seja analisada a curva de torque, já mencionada, ao analisar o gráfico é possível constatar que o torque é sempre inversamente proporcional à velocidade.
O Motor de Passo Nema 23 pode ser utilizado em uma infinidade de projetos automatizados, sendo alguns desses:
01- Motor de Passo Nema 23 –28 Kgf.cm / 3,0A – Vurtz